이번에 사파이어 플러스 v3를 직구로 구매하게 되었다.
기본 큐브 파일에 만족하곤, 라즈베리파이5로 Klipper를 구동하는 중이다.
참고로, 라즈베리파이에 Klipper를 설치할려고 한다면 왠만하면
KIAUH를 사용하기를 추천한다.
GitHub - dw-0/kiauh: Klipper Installation And Update Helper
Klipper Installation And Update Helper. Contribute to dw-0/kiauh development by creating an account on GitHub.
github.com
(라즈베리파이5는 공식 OctoPi (Octoprint가 탑재된 기본 OS)버전이 없어,
설치 하는데만 해도 하루정도 꽤 애를 먹었다.)
본론으로 들어가, 사파이어 플러스의 printer.cfg를 아래에 작성해 놓겠다. 파일도 있으니
참고하길 바란다. 해외 레딧유저들과 국내 블로거 (굿맨)의 printer.cfg를 참고했다.
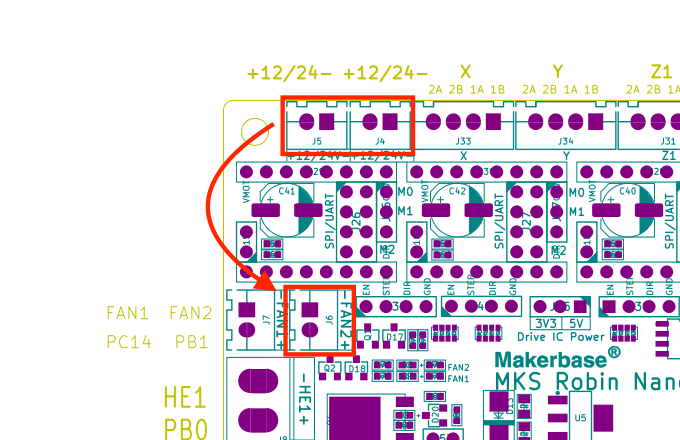
*보드: MKS robin nano v3.1
UI: Mainsail
기본 배선에서, 위의 빨간 네모 둘중에 하나에 있는 히트싱크 팬 케이블을 Fan2 자리로 옮겨야 한다.
(Fan2자리로 옮기면 계속 켜져있는것이 아니라, 핫엔드 온도에 따른 조절이 가능해지게 된다)
+. 'KAMP' 가 시작과 끝 매크로에 사용되었으니 설치 바란다.
설치 방법은 아래 Github이나 유튜브 영상을 찾아보면 된다..
https://github.com/kyleisah/Klipper-Adaptive-Meshing-Purging
GitHub - kyleisah/Klipper-Adaptive-Meshing-Purging: A unique leveling solution for Klipper-enabled 3D printers!
A unique leveling solution for Klipper-enabled 3D printers! - GitHub - kyleisah/Klipper-Adaptive-Meshing-Purging: A unique leveling solution for Klipper-enabled 3D printers!
github.com
# This file contains common pin mappings for the Two Trees Sapphire
# Plus V3 (SP-5) printer (Robin Nano 3, all 2225 drivers at 32 microsteps).
# This file contains common pin mappings for MKS Robin Nano V3
# boards. To use this config, the firmware should be compiled for the
# stm32f407. When running "make menuconfig", select the 48KiB
# bootloader, and enable "USB for communication".
# The "make flash" command does not work on the MKS Robin. Instead,
# after running "make", copy the generated "out/klipper.bin" file to a
# file named "Robin_nano_v3.bin" on an SD card and then restart the
# MKS Robin with that SD card.
# See docs/Config_Reference.md for a description of parameters.
[include mainsail.cfg]
[include KAMP_Settings.cfg]
[mcu]
serial: /dev/serial/by-id/usb-Klipper_stm32f407xx_3F0020000150305148383820-if00
restart_method: command
[printer]
kinematics: corexy
max_velocity: 500
max_accel: 4500
max_z_velocity: 25
max_z_accel: 100
[virtual_sdcard]
path: /home/webcur2010/printer_data/gcodes
on_error_gcode: CANCEL_PRINT
[exclude_object]
[stepper_x]
step_pin: PE3
dir_pin: !PE2
enable_pin: !PE4
microsteps: 16
rotation_distance: 40
endstop_pin: !PA15
position_endstop: 0
position_max: 300
homing_speed: 50
[stepper_y]
step_pin: PE0
dir_pin: !PB9
enable_pin: !PE1
microsteps: 16
rotation_distance: 40
endstop_pin: !PD2
position_endstop: 300
position_max: 300
homing_speed: 50
[stepper_z]
step_pin: PB5
dir_pin: !PB4
enable_pin: !PB8
microsteps: 16
rotation_distance: 8
endstop_pin: !PC8
position_endstop: 0
position_max: 330
#Uncomment if you have a BL-Touch:
#position_min: -3
#endstop_pin: probe:z_virtual_endstop
[extruder]
step_pin: PD6
dir_pin: PD3
enable_pin: !PB3
microsteps: 16
rotation_distance: 5.6055
nozzle_diameter: 0.400
filament_diameter: 1.750
heater_pin: PE5
sensor_type: EPCOS 100K B57560G104F
sensor_pin: PC1
#control: pid
#pid_Kp: 14.669
#pid_Ki: 0.572
#pid_Kd: 94.068
min_temp: 0
max_temp: 250
pressure_advance: 0
pressure_advance_smooth_time: 0.040
max_extrude_cross_section: 7
max_extrude_only_distance: 100
[filament_switch_sensor filament_sensor]
switch_pin: !PA4
runout_gcode: BEEP P=1500
#[extruder1]
#step_pin: PD15
#dir_pin: !PA1
#enable_pin: !PA3
#heater_pin: PB0
#sensor_pin: PA2
[heater_bed]
heater_pin: PA0
sensor_type: EPCOS 100K B57560G104F
sensor_pin: PC0
min_temp: 0
max_temp: 130
#control: pid
#pid_Kp: 325.10
#pid_Ki: 63.35
#pid_Kd: 417.10
[heater_fan heater_fan]
pin: PB1 # Heatsink
[fan]
pin: PC14 # Part cooling
[bed_screws]
screw1: 35,35
screw2: 275,35
screw3: 275,275
screw4: 35,275
[display_status]
[pause_resume]
[firmware_retraction]
retract_length: 3
retract_speed: 55
unretract_extra_length: 0
unretract_speed: 55
[input_shaper]
shaper_freq_x: 50
shaper_type_x: mzv
shaper_freq_y: 50
shaper_type_y: mzv
[skew_correction]
########################################
# TMC2209 configuration
########################################
[tmc2209 stepper_x]
uart_pin: PD5
run_current: 0.800
stealthchop_threshold: 999999
[tmc2209 stepper_y]
uart_pin: PD7
run_current: 0.800
stealthchop_threshold: 999999
[tmc2209 stepper_z]
uart_pin: PD4
run_current: 1.200
stealthchop_threshold: 999999
[tmc2209 extruder]
uart_pin: PD9
run_current: 0.800
stealthchop_threshold: 999999
#[tmc2209 extruder1]
#uart_pin: PD8
#run_current: 0.800
#stealthchop_threshold: 999999
########################################
# ABL (CRtouch) configuration
########################################
#[bltouch]
#sensor_pin: #VERIFICAR #^PD2
#control_pin: #VERIFICAR #PA8
#set_output_mode: 5V
#pin_move_time: 0.4
#stow_on_each_sample: False
#probe_with_touch_mode: False
#x_offset: 43
#y_offset: 10
#z_offset: 0
#samples: 2
#sample_retract_dist: 2
#samples_result: average
#[bed_mesh]
#speed: 120
#horizontal_move_z: 5
#mesh_min: 53, 53
#mesh_max: 285, 290
#mesh_min: 46.50,0.75
#mesh_max: 253.5,295.85
#probe_count: 5,5
#algorithm: bicubic
# [safe_z_home]
# home_xy_position: 150,150
# speed: 80
# z_hop: 10
# z_hop_speed: 10
########################################
# EXP1 / EXP2 (display) pins
########################################
[board_pins]
aliases:
# EXP1 header
EXP1_1=PC5, EXP1_3=PD13, EXP1_5=PE14, EXP1_7=PD11, EXP1_9=<GND>,
EXP1_2=PE13, EXP1_4=PC6, EXP1_6=PE15, EXP1_8=PD10, EXP1_10=<5V>,
# EXP2 header
EXP2_1=PA6, EXP2_3=PE8, EXP2_5=PE11, EXP2_7=PE12, EXP2_9=<GND>,
EXP2_2=PA5, EXP2_4=PE10, EXP2_6=PA7, EXP2_8=<RST>, EXP2_10=<3.3v>
# Pins EXP2_1, EXP2_6, EXP2_2 are also MISO, MOSI, SCK of bus "ssp1"
# See the sample-lcd.cfg file for definitions of common LCD displays.
########################################
# Macros
########################################
[gcode_macro START_PRINT]
gcode:
{% set BED_TEMP = params.BED_TEMP|default(60)|float %}
{% set EXTRUDER_TEMP = params.EXTRUDER_TEMP|default(190)|float %}
# Start bed heating (but don't wait for it)
M140 S{BED_TEMP}
# Use absolute coordinates
G90
# Reset the G-Code Z offset (adjust Z offset if needed)
SET_GCODE_OFFSET Z=0.0
# Home the printer
G28
# # Move the nozzle near the bed
# G1 Z5 F3000
# # Move the hotend inside the bed
# G1 X5 Y5 F3000
# # Move the nozzle very close to the bed
# G1 Z0.2 F300
SMART_PARK
# Set nozzle heating (no waiting)
M104 S{EXTRUDER_TEMP}
# Wait for bed to reach temperature
M190 S{BED_TEMP}
# Wait for nozzle to reach temperature
M109 S{EXTRUDER_TEMP}
LINE_PURGE
[gcode_macro END_PRINT]
gcode:
# Turn off bed, extruder, and fan
M140 S0
M104 S0
M106 S0
# Move nozzle away from print while retracting
G91
G1 X-2 Y-2 E-3 F300
# Raise nozzle by 10mm
G1 Z10 F3000
G90
G1 X5 Y5
# Disable steppers
M84
#*# <---------------------- SAVE_CONFIG ---------------------->
#*# DO NOT EDIT THIS BLOCK OR BELOW. The contents are auto-generated.
#*#
#*# [heater_bed]
#*# control = pid
#*# pid_kp = 72.770
#*# pid_ki = 1.080
#*# pid_kd = 1225.264
#*#
#*# [extruder]
#*# control = pid
#*# pid_kp = 22.497
#*# pid_ki = 1.190
#*# pid_kd = 106.297'3d Printing > Klipper' 카테고리의 다른 글
| Klipper - Crowsnest를 이용한 카메라 추가 (1) | 2024.02.15 |
|---|